Stiffness Based Stability Enhancement in Human-Robot Collaboration
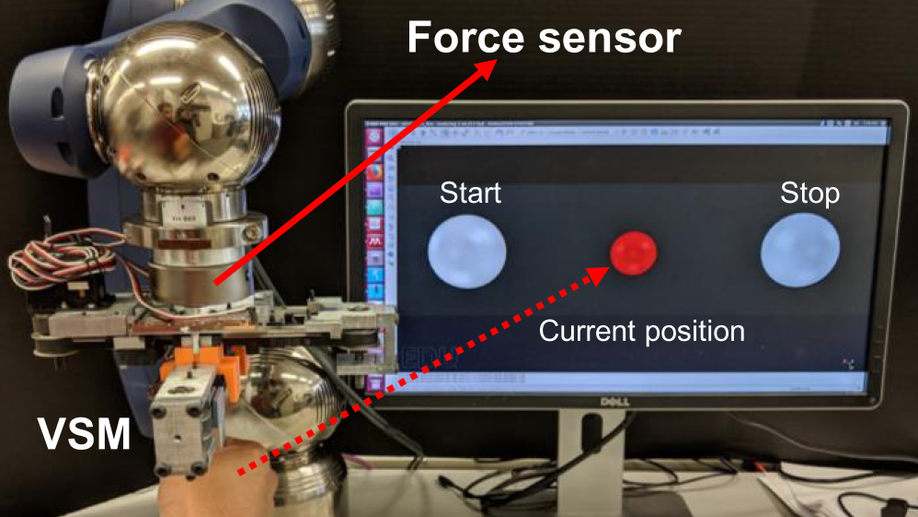
This paper presents the importance of endpoint stiffness and its role in improving the interaction stability of a human-robot collaborative task. A low effort collaborative task is simulated with the help of an admittance controlled robot. The performance of this robot for different levels of grasp stiffness are compared and a solution in the form of a Variable Stiffness Mechanism is provided. This mechanism provides an opportunity to modify the stiffness at the port of interaction based on two measures, an instability index in the frequency domain, and human muscle contraction in the time domain. Experimental results show an improvement in the performance and stability for the system with high stiffness vs low stiffness. Human muscle contraction provides a time instant at which the stiffness has to be modified and the instability index value provides information about the direction in which the stiffness has to be modified.
Improving Stability in Upper Limb Rehabilitation Using Variable Stiffness
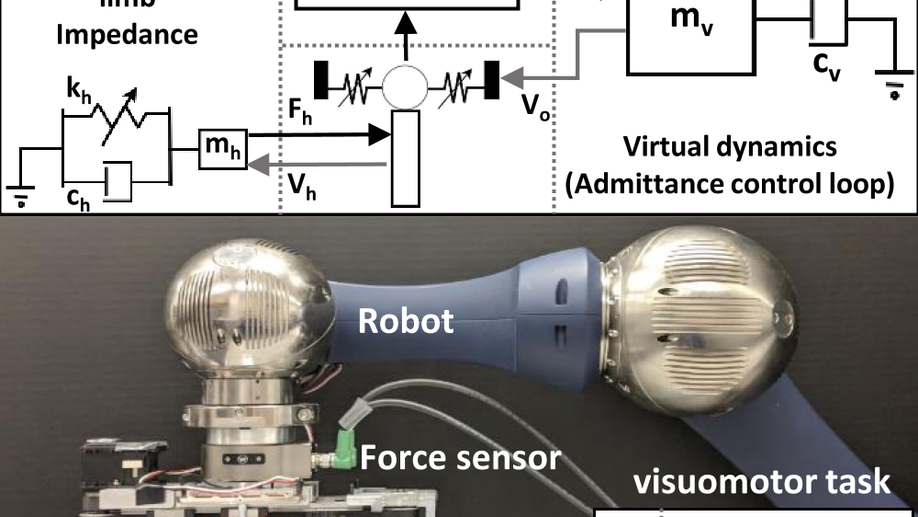
In a robotic rehabilitation setup, patient’s safety and interaction stability are critical throughout the therapy. This paper addresses the stability aspect by proposing a method to vary the endpoint stiffness using a variable impedance mechanism. The proposed device consists of permanent magnets in an antagonistic configuration that acts as springs and the variation in stiffness is achieved by modifying the separation between those magnets. This device is mounted on the end-effector of an admittance controlled robotic arm and tested with the help of healthy humans on a virtual maze traversal experiment consisting of both fine and gross motor regions. Moreover, the subjects are tested both in normal and simulated tremor conditions to verify the effectiveness of the device. The experimental results show that the VSM can not only suppress the high-frequency forces but can also reduce the interference of human endpoint stiffness in the stability of the robot.
Variable Stiffness Mechanism for Suppressing Unintended Forces in Physical Human–Robot Interaction
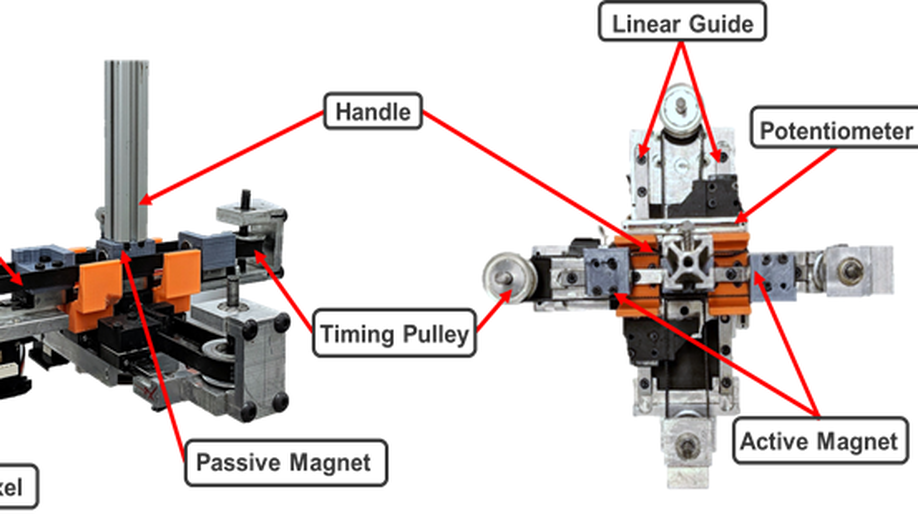
This paper presents the design of a two-degrees-of-freedom (DoFs) variable stiffness mechanism and demonstrates how its adjustable compliance can enhance the robustness of physical human–robot interaction. Compliance on the grasp handle is achieved by suspending it in between magnets in preloaded repelling configuration to act as nonlinear springs. By adjusting the air gaps between the outer magnets, the stiffness of the mechanism in each direction can be adjusted independently. Moreover, the capability of the proposed design in suppressing unintended interaction forces is evaluated in two different experiments. In the first experiment, improper admittance controller gain leads to unstable interaction, whereas in the second case, high-frequency involuntary forces are caused by the tremor.
Variable Stiffness Mechanism for Tremor Suppression in Human-Robot Interaction
Variable stiffness mechanisms have a wide range of applications in the field of human-robot interactions such as rehabilitation robotics, prosthesis and industrial robotics due to their ability to comply with the human limb stiffness in an unstructured environment. This paper presents the analysis of a single degree of freedom variable stiffness actuator based on nonlinear force interactions between permanent magnets and its effect on the natural frequency of the system. In the proposed mechanism, variable stiffness is achieved by modifying the separation between magnets. The main goal here is to achieve a desired cutoff frequency by varying the stiffness of the system to filter out the involuntary movement of upper limb during physical human-robot interactions. Moreover, due to the spring-like non-contact force interactions between magnets, this mechanism can prevent the exchange of high impact forces between the robot and human.
Design of a 2D Haptic System With Passive Variable Stiffness Using Permanent Magnets for Upper-Limb Rehabilitation
This paper presents a design of variable stiffness actuation system based on on the force interactions caused by permanent magnets. The system is designed for rehabilitation of the upper limb with the goal to enhance rehabilitation in both clinical and home environments. The proposed active rehabilitation system is composed of a lightweight 6-axes robotic arm to move the patients hand in the desired trajectory. The interaction stiffness is controlled by the mechanism attached to the end-effector. For this purpose, repelling magnet pairs in linear antagonistic configuration are used to control the stiffness of the handle. Stiffness in the mechanism can be controlled via adjusting the distance between the magnets. A mathematical model is presented to analyze the range of adjustable variable stiffness for this mechanism.