Design of a 2D Haptic System With Passive Variable Stiffness Using Permanent Magnets for Upper-Limb Rehabilitation
Abstract
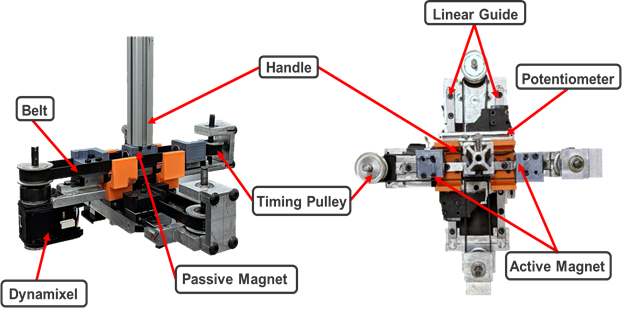
This paper presents a design of variable stiffness actuation system based on on the force interactions caused by permanent magnets. The system is designed for rehabilitation of the upper limb with the goal to enhance rehabilitation in both clinical and home environments. The proposed active rehabilitation system is composed of a lightweight 6-axes robotic arm to move the patients hand in the desired trajectory. The interaction stiffness is controlled by the mechanism attached to the end-effector. For this purpose, repelling magnet pairs in linear antagonistic configuration are used to control the stiffness of the handle. Stiffness in the mechanism can be controlled via adjusting the distance between the magnets. A mathematical model is presented to analyze the range of adjustable variable stiffness for this mechanism.